Interbotix X-Series Arms
Attention
This documentation is for the Interbotix X-Series Arms from Trossen Robotics. If you are looking for documentation on the Trossen AI Arms and related software and integrations, please visit the Trossen AI Arms Documentation.
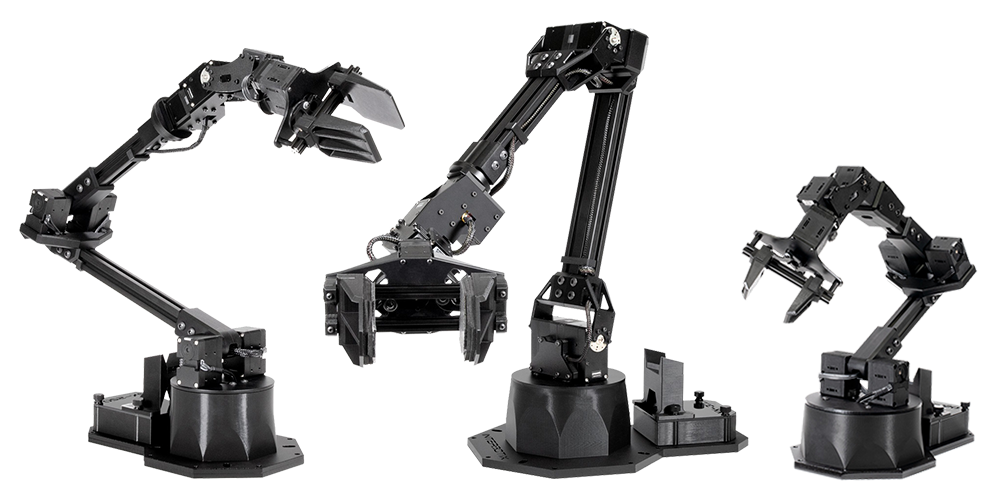
Interbotix ROS robotic arms are the perfect addition to any research facility, university classroom or laboratory. Featuring the DYNAMIXEL X-Series smart servos, the line offers 4, 5 and 6 degree of freedom platforms. All of which are controlled by the same central ROS code repository. All of the X-Series arms are supported with tutorials, videos and software demos including MoveIt and Gazebo simulation, as well as computer vision applications such as pick and place.
| Model Name and Store Link | Robot Documentation | Codename |
|---|---|---|
| PincherX-100 Robot Arm | PincherX-100 Robot Arm Documentation | px100 |
| ReactorX-200 Robot Arm | ReactorX-200 Robot Arm Documentation | rx200 |
| WidowX-250 Robot 6DOF Arm | WidowX-250 Robot 6DOF Arm Documentation | wx250s |
| ViperX-300 Robot 6DOF Arm | ViperX-300 Robot 6DOF Arm Documentation | vx300s |
What’s Here
- Specifications - Specifications for the X-Series Arms and related hardware.
- Getting Started - Guides to walk you through the process of setting up your X-Series Arm.
- ROS Interface - Guides on how to use the ROS Interfaces.
- Python-ROS Interface - Guides on how to use the Python-ROS Interfaces.
- MATLAB-ROS Interface - Guides on how to use the MATLAB-ROS Interfaces.
- ROS 1 Open Source Packages - Guides for each core and demo package in the ROS 1 Interface.
- ROS 2 Open Source Packages - Guides for each core and demo package in the ROS 2 Interface.
- Troubleshooting - Small guides to walk users through possible issues they may occur when using a DYNAMIXEL-based robot.
Table of Contents
- Specifications
- Getting Started
- ROS Interface
- Python-ROS Interface
- MATLAB-ROS Interface
- ROS 1 Open Source Packages
- Arm Descriptions
- Arm Control
- Gazebo Configuration
- ROS Controllers Configuration
- MoveIt Configuration
- Perception Configuration
- MoveIt Interface and API
- Python Demos
- MATLAB Demos
- Joystick Control
- Record And Playback
- Arm Diagnostic Tool
- Arm Diagnostic Listener
- PID Gains Test Environment
- Arm Puppeteering
- Dual Arm Control
- Dual Arm Joystick Control
- Contributing
- ROS 2 Open Source Packages
- Troubleshooting