ViperX-300 6DOF
Overview
The ViperX-300 6DOF Robot Arm belongs to the Interbotix X-Series family of arms featuring the DYNAMIXEL X-Series Actuators from Robotis. The X-Series actuators offer higher torque, more efficient heat dissipation and better durability all at a smaller form factor over previous DYNAMIXEL servos. The DYNAMIXEL XM540-W270 & DYNAMIXEL XM430-W350 servos offer high resolution of 4096 positions and user definable PID parameters, temperature monitoring, positional feedback, as well as voltage levels, load, and compliance settings are user accessible as well. At the heart of the ViperX-300 6DOF is the Robotis DYNAMIXEL U2D2 which enables easy access to DYNAMIXEL Wizard software as well as ROS. The ViperX-300 6DOF offers 6 degree of freedom and a full 360 degree of rotation.
The main advantage to using a 6 degree of freedom arm is the increased maneuverability it provides. In general, the pose of an arm’s end-effector can be described by its position (x, y, z) and orientation (roll, pitch, yaw) in 3D space. While each of these six factors can be controlled independently with a 6DOF arm, one or more of them must be constrained with lower dof arms.

|
|
||||||||||||||||||
Note
* Working Payload for the ViperX-300 6DOF is inside its maximum reach, if intending to use a 750g weight we recommend no more than a 50% extension of the arm.
Default Joint Limits
Default joint limits are the safe range of operation for each joint. These are set in the firmware, defined as degrees from Zero (servo centered).
| Joint | Min | Max | Servo ID(s) |
|---|---|---|---|
| Waist | -180 | 180 | 1 |
| Shoulder | -101 | 101 | 2+3 |
| Elbow | -101 | 92 | 4+5 |
| Wrist Angle | -107 | 130 | 6 |
| Forearm Roll | -180 | 180 | 7 |
| Wrist Rotate | -180 | 180 | 8 |
| Gripper | 42mm | 116mm | 9 |
Default Servo Configurations
| ID | Joint Name | Servo | Baudrate |
|---|---|---|---|
| 1 | waist | XM540-W270 | 1Mbps |
| 2 | shoulder | XM540-W270 | 1Mbps |
| 3 | shoulder_shadow | XM540-W270 | 1Mbps |
| 4 | elbow | XM540-W270 | 1Mbps |
| 5 | elbow_shadow | XM540-W270 | 1Mbps |
| 6 | forearm_roll | XM540-W270 | 1Mbps |
| 7 | wrist_angle | XM540-W270 | 1Mbps |
| 8 | wrist_rotate | XM430-W350 | 1Mbps |
| 9 | gripper | XM430-W350 | 1Mbps |
Kinematic Properties
Product of Exponentials
Read more about the product of exponential approach.
Dynamical Model
The Euler-Lagrange dynamical model of the ViperX-300s 6DOF arm was derived by Mu’taz Momani and Mehdi Hosseinzadeh and is available in the following paper: Physically feasible dynamic model identification and constrained control of robotic arms: A case study on the ViperX-300 6-DoF robotic manipulator.
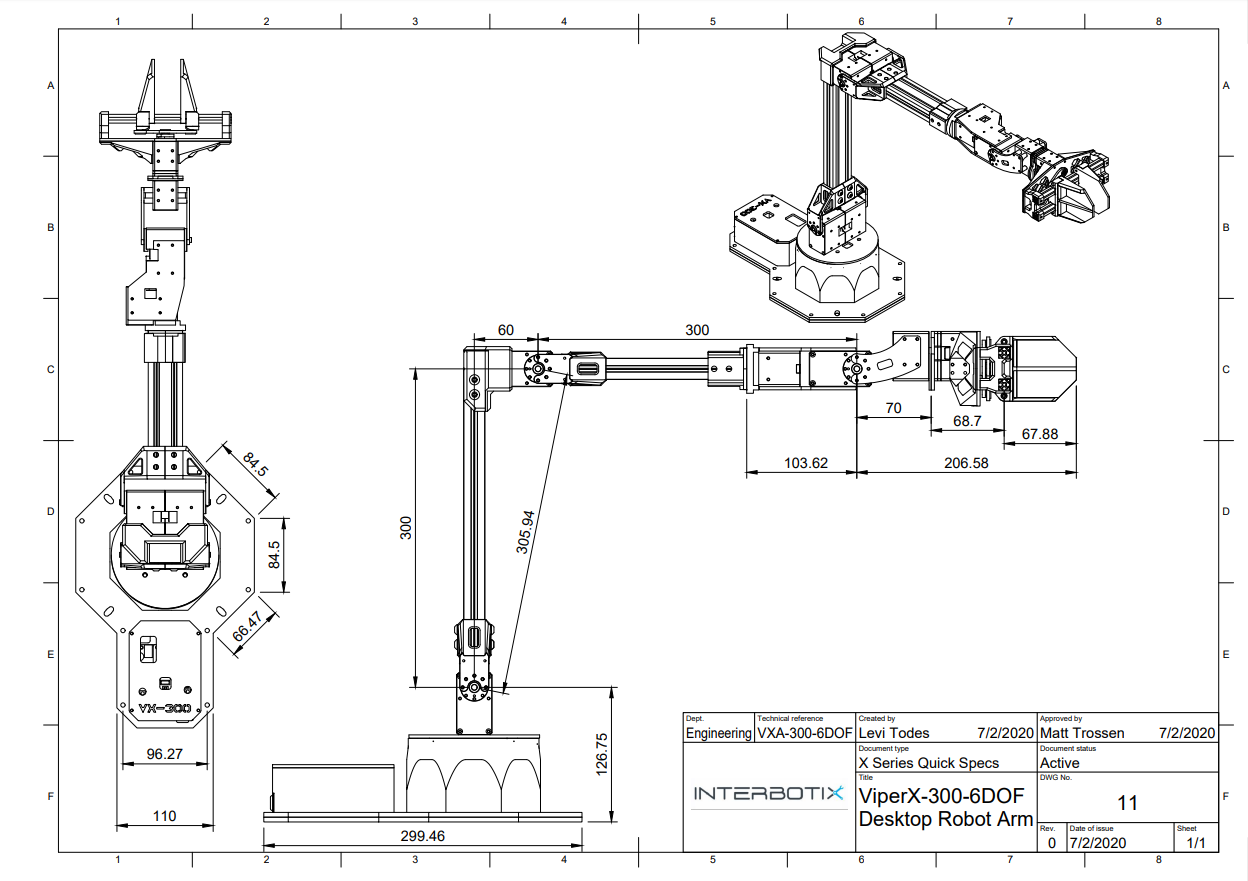
Drawings and CAD Files