Arm Descriptions
 View Package on GitHub
View Package on GitHub
Overview
This package contains the URDFs and meshes for the many X-Series Interbotix Arms. The STL files for each robot are located in a unique folder inside the meshes directory. Also in the ‘meshes’ directory is the interbotix_black.png picture. The appearance and texture of the robots come from this picture. Next, the URDFs for the robot are located in the urdf directory. They are written in ‘xacro’ format so that users have the ability to customize what parts of the URDF get loaded to the parameter server (see the ‘Usage’ section below for details). Note that all the other Interbotix X-Series Arms core ROS packages in the sub-repo reference this package to launch the robot description.
Structure
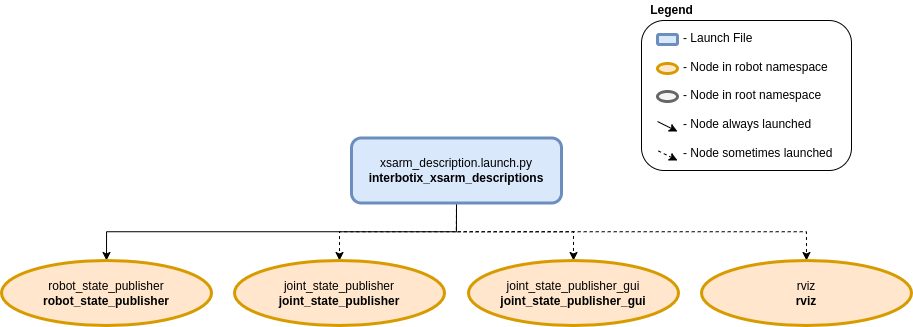
This package contains the xsarm_description.launch.py file responsible for loading parts or all of the robot model. It launches up to four nodes as described below:
- joint_state_publisher - responsible for parsing the
robot_descriptiontopic to find all non-fixed joints and publish a sensor_msgs/msg/JointState message with those joints defined. - joint_state_publisher_gui - does the same thing as the joint_state_publisher node but with a GUI that allows a user to easily manipulate the joints.
- robot_state_publisher - uses the URDF specified by the parameter
robot_descriptionand the joint positions from thejoint_statestopic to calculate the forward kinematics of the robot and publish the results via thetfandtf_statictopics. - rviz - displays the virtual robot model using the transforms in the
tftopic.
Usage
This package contains two launch files:
- xsarm_description.launch.py - should be included in any launch tree in which you want to load and parse the URDF, or can be launched to view any robot model’s URDF in RViz.
- remote_view.launch.py which simply loads RViz in the proper namespace.
xsarm_description.launch.py
To run this launch file, enter the command below in a terminal. Note that the robot_model
argument must be specified as the name of one of the URDF files located in the urdf directory
(excluding the ‘.urdf.xacro’ part). For example, to launch the ReactorX-150 arm, type:
$ ros2 launch interbotix_xsarm_descriptions xsarm_description.launch.py robot_model:=rx150 use_joint_pub_gui:=true
This is the bare minimum needed to get up and running. Take a look at the table below to see how to further customize with other launch file arguments.
| Argument | Description | Default | Choices |
|---|---|---|---|
| robot_model | model type of the Interbotix Arm such as wx200 or rx150. |
px100, px150, rx150, rx200, wx200, wx250, wx250s, vx250, vx300, vx300s, mobile_px100, mobile_wx200, mobile_wx250s |
|
| robot_name | name of the robot (typically equal to robot_model, but could be anything). |
LaunchConfig(robot_model) |
|
| use_rviz | launches RViz if set to true. |
true |
true, false |
| use_joint_pub | launches the joint_state_publisher node. | false |
true, false |
| use_joint_pub_gui | launches the joint_state_publisher GUI. | false |
true, false |
| rvizconfig | file path to the config file RViz should load. | LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_descriptions) + ‘rviz’ + ‘xsarm_description.rviz’’) |
|
| use_sim_time | tells ROS nodes asking for time to get the Gazebo-published simulation time, published over the ROS topic /clock. | false |
true, false |
| base_link_frame | name of the ‘root’ link on the arm; typically base_link, but can be changed if attaching the arm to a mobile base that already has a base_link frame. |
base_link |
|
| use_gripper | if true, the default gripper is included in the robot_description parameter; if false, it is left out; set to false if not using the default gripper. |
true |
true, false |
| show_ar_tag | if true, the AR tag mount is included in the robot_description parameter; if false, it is left out; set to true if using the AR tag mount in your project. |
false |
true, false |
| show_gripper_bar | if true, the gripper_bar link is included in the robot_description parameter; if false, the gripper_bar and finger links are not loaded. Set to false if you have a custom gripper attachment. |
true |
true, false |
| show_gripper_fingers | if true, the gripper fingers are included in the robot_description parameter; if false, the gripper finger links are not loaded. Set to false if you have custom gripper fingers. |
true |
true, false |
| use_world_frame | set this to true if you would like to load a ‘world’ frame to the robot_description parameter which is located exactly at the ‘base_link’ frame of the robot; if using multiple robots or if you would like to attach the ‘base_link’ frame of the robot to a different frame, set this to false. |
true |
true, false |
| external_urdf_loc | the file path to the custom urdf.xacro file that you would like to include in the Interbotix robot’s urdf.xacro file. | ‘’ | |
| hardware_type | configures the robot_description parameter to use the actual hardware, fake hardware, or hardware simulated in Gazebo. |
actual |
actual, fake, gz_classic |
| robot_description | URDF of the robot; this is typically generated by the xacro command. | Command(FindExec(xacro) + ‘ ‘ + LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_descriptions) + ‘urdf’ + LaunchConfig(robot_model)’) + ‘.urdf.xacro ‘ + ‘robot_name:=’ + LaunchConfig(robot_name) + ‘ ‘ + ‘base_link_frame:=’ + LaunchConfig(base_link_frame) + ‘ ‘ + ‘use_gripper:=’ + LaunchConfig(use_gripper) + ‘ ‘ + ‘show_ar_tag:=’ + LaunchConfig(show_ar_tag) + ‘ ‘ + ‘show_gripper_bar:=’ + LaunchConfig(show_gripper_bar) + ‘ ‘ + ‘show_gripper_fingers:=’ + LaunchConfig(show_gripper_fingers) + ‘ ‘ + ‘use_world_frame:=’ + LaunchConfig(use_world_frame) + ‘ ‘ + ‘external_urdf_loc:=’ + LaunchConfig(external_urdf_loc) + ‘ ‘ + ‘hardware_type:=’ + LaunchConfig(hardware_type) + ‘ ‘) |
remote_view.launch.py
To run this launch file, enter the command below in a terminal.
$ ros2 launch interbotix_xsarm_descriptions remote_view.launch.py robot_model:=rx150 use_joint_pub_gui:=true
This is the bare minimum needed to get up and running. Take a look at the table below to see how to further customize with other launch file arguments.
| Argument | Description | Default | Choices |
|---|---|---|---|
| robot_name | name of the robot (typically equal to robot_model, but could be anything). |
||
| rvizconfig | file path to the config file RViz should load. | LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_descriptions) + ‘rviz’ + ‘xsarm_description.rviz’’) |