Collision Detection
Collision detection is mainly used for reducing the impact on the robot to avoid damage to the robot or external equipment. If the collision detection feature is activated, the robot arm will pause its current execution when a collision is detected.
After collision detection is enabled, the safety level will be displayed in the connection panel on the top toolbar.

When collision is detected when jogging the robot, the “Collision Detection” window will pop up. In this case, you need to resolve the collision and click Reset. If you need to operate the software to resolve the collision, click Remind me in a minute to temporarily close the pop-up window (a pop-up message will be displayed again in one minute).

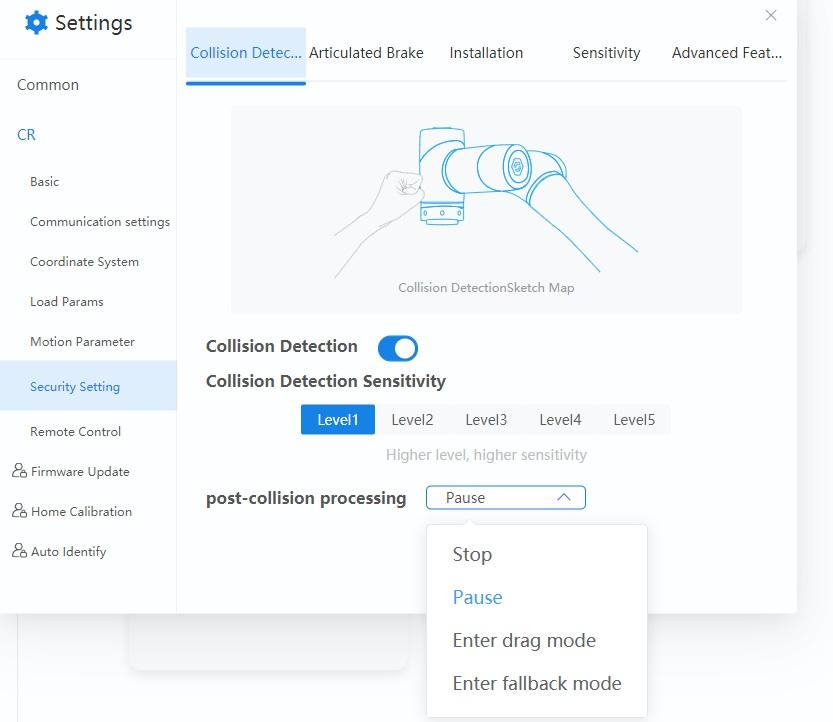
Post-collision Processing
Post-collision processing refers to the treatment after collision while the robot arm is running the project:
- Stop: The robot arm stops running the project.
- Pause: The robot arm pauses. You need to select whether to resume the operation after solving the cause of the collision according to the actual condition, or stop the operation.
- Enter drag mode: The robot arm stops running the project and automatically enters drag mode.
- Enter fallback mode: The robot arm automatically backs off the specified distance according to the trajectory before the collision. The fallback distance range is 0~50mm.
