Basic Settings
Overview
The Basic Settings page is used to see device specifications and set the robot’s pose.
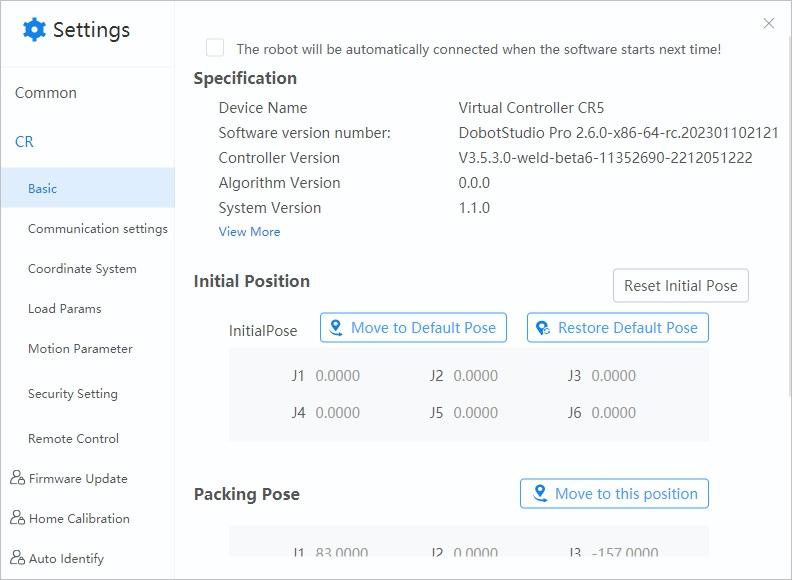
- The robot will be automatically connected when the software starts next time: Checking this box tells DobotStudio Pro to attempt to connect to this robot automatically the next time it is opened.
- View More: Shows more firmware version information.
Initial Position
The initial position is a configurable robot configuration that is the home pose by default - one in which all joints are at their zero position.
- Initial Position > Reset Initial Pose: Set joint values for the Initial Pose

- Initial Position > Move to Default Pose: Long press to command the robot to its Default Pose.
- Initial Position > Restore Default Pose: Reset the Default Pose to the zero position.
Packing and Zero Pose

- Packing Pose > Move to this position: Long press to command the robot to its packing position.
- Zero Pose > Move to this position: Long press to command the robot to its zero.