Home Calibration
After some parts (motors, reduction gear units) of the robot arm have been replaced or the robot has been hit, the home point of the robot will be changed. In this case you need to reset the home point.
Note
- Home calibration is used only when the home position changes. Please operate cautiously.
- The home calibration function can be used after you enter the password (default password:
888888)
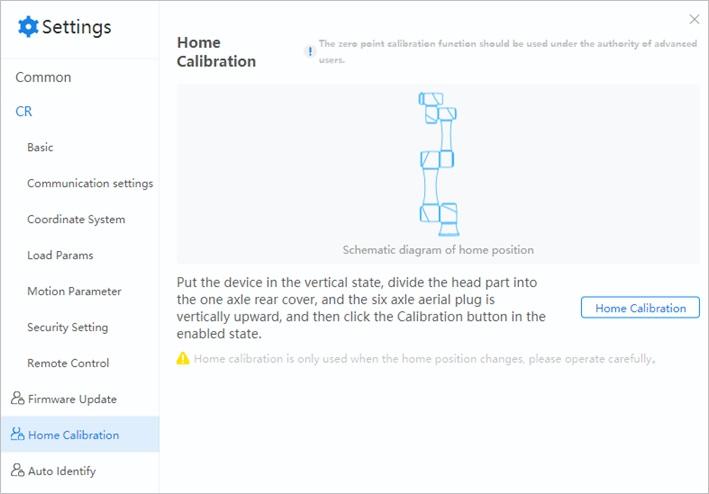
Move the robot to the home point according to the prompt in the page. Click Home Calibration when the robot is enabled.
After calibration, you can check the joint coordinates in the control panel. Note that all joint coordinates (J1-J6) are at zero degrees.