Load Parameters
To ensure optimal robot performance, it is important to make sure the load and eccentric coordinates of the end effector are within the maximum range for the robot, and that Joint 6 does not become eccentric. Setting load and eccentric coordinates improves the motion of robot and reduces vibration.
Note
Every time you enable the robot, the “Load Enable Modification” window will pop up which requires you to set the load parameters. The parameters you set will be synchronized to this “Load Params” page.
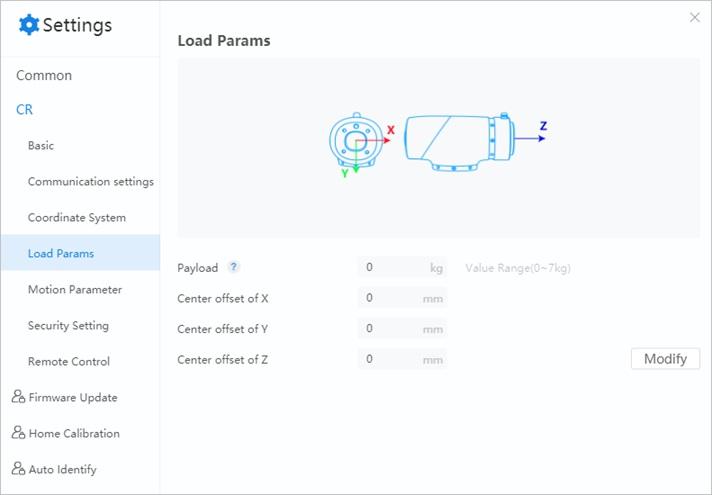
Click Modify to modify the load parameters.
- Eccentric coordinates of the payload should be set when J6 is 0°.
- The load weight includes the weight of the end effector and workpiece. This should not exceed the maximum payload of the robot arm.
After setting the parameters, click OK.
Attention
Set load and eccentric coordinates properly. Otherwise, it may cause errors or excessive shock, and will shorten the lifespan of the robot.