User Coordinate System
When the position of a workpiece is changed or a robot program needs to be reused in multiple processing systems of the same type, user coordinate systems can be created to simplify programming. DobotStudio Pro supports up to ten user coordinate systems. User coordinate system 0 is defined as the base coordinate system and cannot be changed.
Note
When creating a user coordinate system, make sure that the reference coordinate system is the base coordinate system 0.
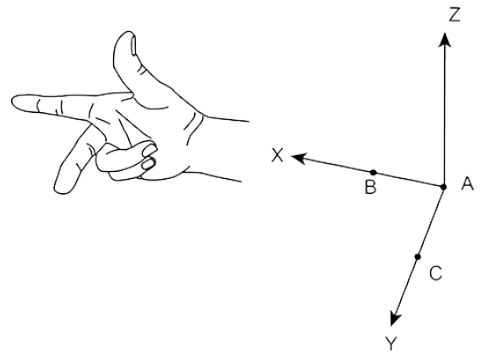
A user coordinate system is created by a three-point calibration method. The robot is moved to three points: A (x1, y1, z1), B (x2, y2, z2), and C (x3, y3, z3). Point A is defined as the origin. The line from point A to point B defines the positive direction of X-axis. The line at which point C is perpendicular to X-axis defines the positive direction of Y-axis. The Z-axis is defined via the right-hand rule.
Creating a User Coordinate System
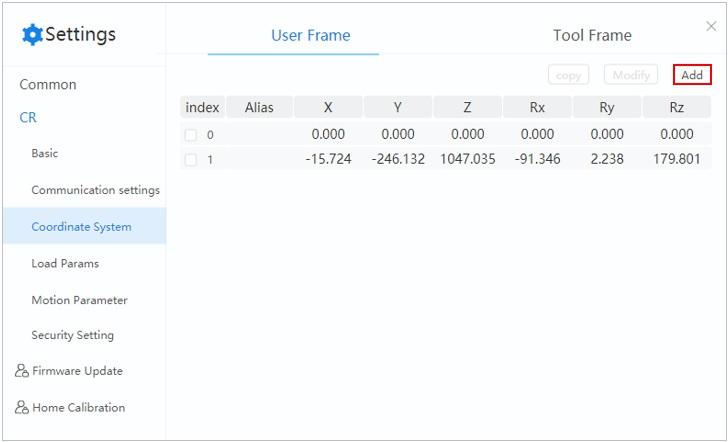
- Click Add
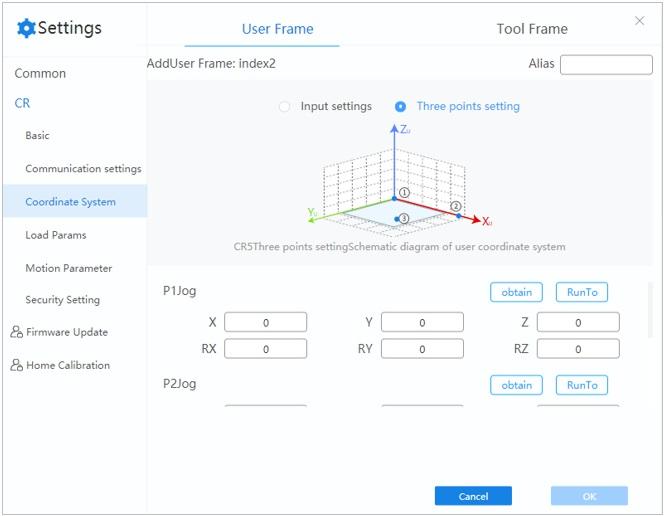
- Select Three points setting in the “Add User Frame: index2” page.
Note
- When creating a user coordinate system, make sure that the reference coordinate system is the base coordinate system 0.
- Long pressing Run To moves the robot to the set points.
- Jog the robot to the point P1 and click obtain on the P1 panel.
- Jog the robot to the point P2 and click obtain on the P2 panel.
- Jog the robot to the point P3 and click obtain on the P3 panel.
- Click OK. The user coordinate system is created successfully.
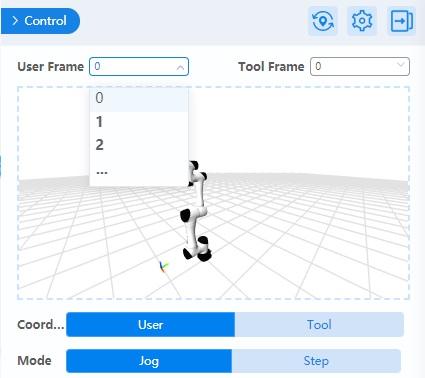
The user coordinate system can be selected when jogging the robot arm.
Note
When creating or modifying a user coordinate system, you can also select Input settings and directly enter X, Y, Z, Rx, Ry and Rz values.
Other operations
Modify a coordinate system
Select a coordinate system and click Modify. The procedure to modify an existing coordinate system is the same as adding a new coordinate system.
Copy a coordinate system
Create a new coordinate system based another by selecting a coordinate system and clicking copy. This new system will be the same as the copied one.