Trossen Arm Description
The Trossen Arm Description package provides description files for the Trossen Arms.
Usage
To visualize the Trossen Arm in RViz, you can use the following command:
source ~/ros2_ws/install/setup.bash
ros2 launch trossen_arm_description display.launch.py robot_model:=wxai use_joint_pub_gui:=true
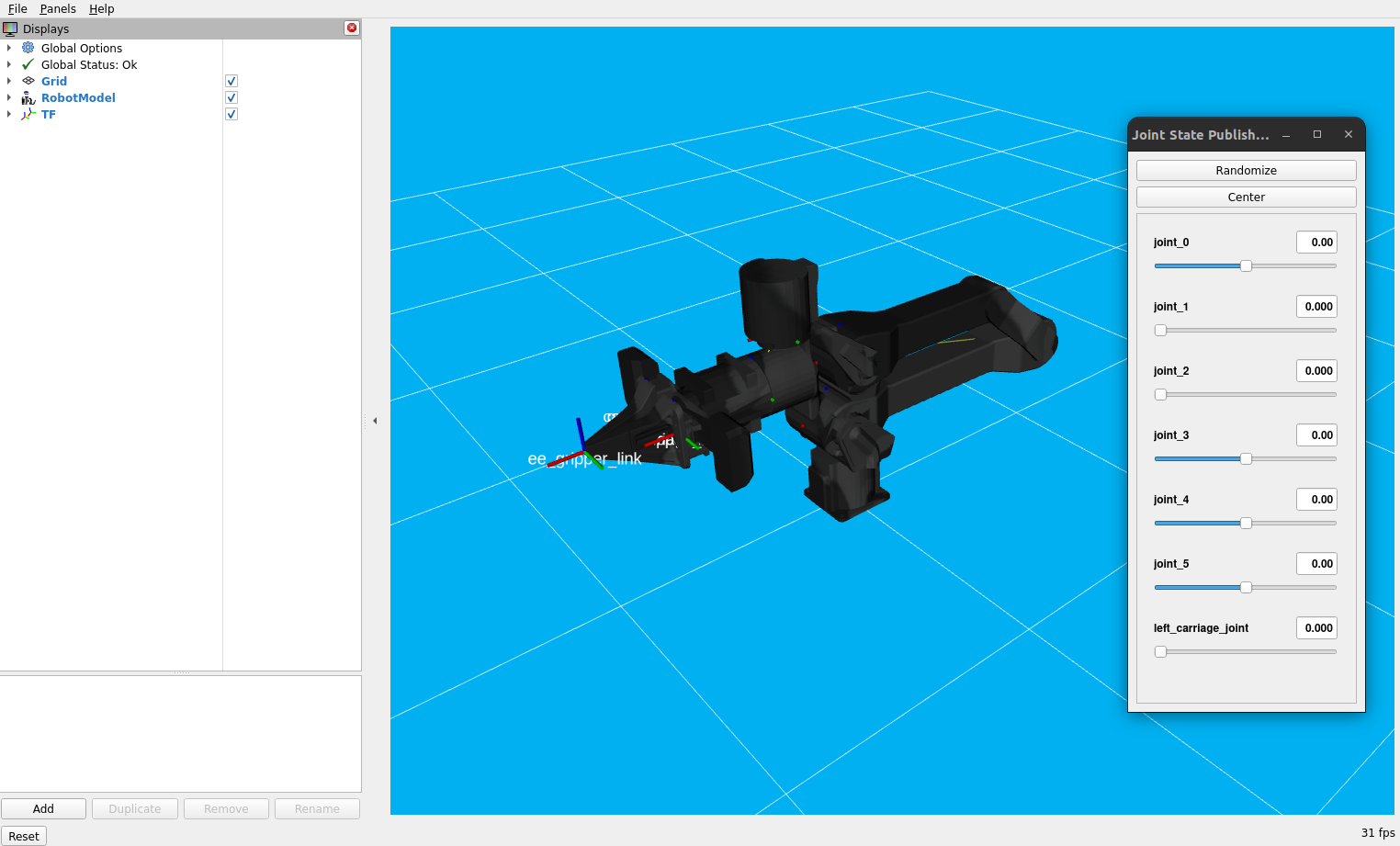
This will bring up RViz with the Trossen Arm model loaded, allowing you to visualize the arm and its joints.
Setting the use_joint_pub_gui launch argument to true launches a GUI that allows users to manually control the arm’s joints.
To further customize the display launch file at runtime, refer to the table below, or run the command below
ros2 launch trossen_arm_description display.launch.py --show-args
Argument |
Description |
Default |
Choices |
|---|---|---|---|
robot_model |
model type of the Trossen Arm. |
|
|
use_rviz |
launches RViz if set to |
|
|
use_joint_pub |
launches the joint_state_publisher node. |
|
|
use_joint_pub_gui |
launches the joint_state_publisher GUI. |
|
|
rvizconfig |
file path to the config file RViz should load. |
LocalVar(‘FindPackageShare(pkg= |
|
arm_variant |
End effector variant of the Trossen Arm. |
|
|
arm_side |
Side of the Trossen Arm. Note that only the wxai follower variant has a left and right side. |
|
|
robot_description |
URDF of the robot; this is typically generated by the xacro command. |
Command(FindExec( |
Next Steps
Now that you are able to visualize the Trossen Arm, you can proceed to the next tutorial to learn how to control the arm using ros2_control in the Trossen Arm Bringup package.