ROS 2 Quickstart Guide
This guide is intended to get the use familiar with the basic functions and interfaces of the ROS 2 Interface.
Source your workspace by running the command below. This should be done in every new terminal to properly configure your ROS environment. You can add this line to the end of your
~/.bashrcfile for convenience to source the workspace in every new terminal. If you installed the packages to a different location, update the command accordingly.$ source ~/interbotix_ws/install/setup.bash
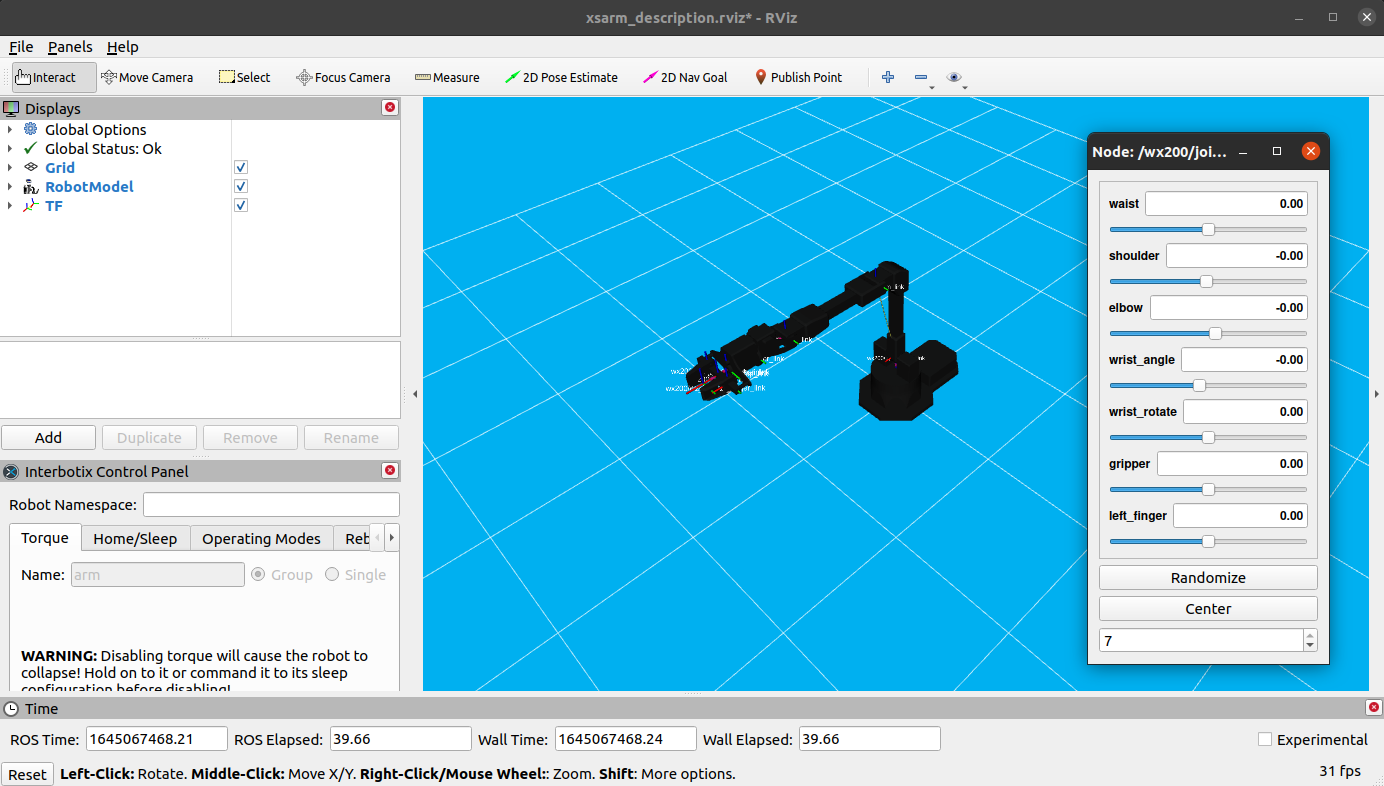
Get familiar with the virtual robot model by launching it in RViz and playing with the joint_state_publisher. Note that you must specify which arm model is being used as a command line argument. For example, the WidowX-200 robot arm can be launched with the command below. Make sure to press Ctrl + C in the terminal when to end the session you’re done.
$ ros2 launch interbotix_xsarm_descriptions xsarm_description.launch.py robot_model:=wx200 use_joint_pub_gui:=true
Get familiar with the physical robot arm (we’ll use a ViperX-250 as an example) by executing the following command in the terminal:
$ ros2 launch interbotix_xsarm_control xsarm_control.launch.py robot_model:=vx250
By default, all the motors in the robot are torqued on so it will be very difficult to manually manipulate it. To torque off all the motors, execute the command below in another terminal.
Warning
This command will cause the robot arm to collapse (if it’s not already resting) so manually hold or secure it before executing.
$ ros2 service call /vx250/torque_enable interbotix_xs_msgs/srv/TorqueEnable "{cmd_type: 'group', name: 'all', enable: false}"
Note
The command above torques off every motor in the
allgroup. This is a special group that includes every Dynamixel motor in the manipulator. To only torque off the arm motors, change the name fromalltoarm.Group Name Servos in Group allEvery DYNAMIXEL servo on the robot armAll DYNAMIXEL servos on the arm excluding the gripper Now you should be able to freely manipulate the arm and gripper. Take note of how the RViz model accurately mimics the real robot. To make the robot hold a certain pose, manually hold the robot in the desired pose and execute the following command:
$ ros2 service call /vx250/torque_enable interbotix_xs_msgs/srv/TorqueEnable "{cmd_type: 'group', name: 'all', enable: true}"
Let go and observe how the arm stays in place.
Hold on to the robot and shutdown all nodes by pressing Ctrl + C in the terminal where you started the launch file.
Warning
Ending the control process will cause the robot arm to collapse (if it’s not already resting) so manually hold or secure it before executing.
Another way to check if all functions work is to launch the interbotix_xsarm_joy package. This package allows you to control your arm using a Bluetooth controller. See it’s usage details in its documentation page.
That ends the quickstart tutorial. To get familiar with the architecture and launch file arguments, refer to the READMEs of the core packages. Start with the X-Series Arm Descriptions package, then the X-Series Arm Control package. Next, look at the Gazebo Configuration package followed by the ROS Controllers Configuration and MoveIt Configuration packages. This is the most logical approach to take to gain a better understanding of how they relate to each other.
Afterwards, feel free to check out the demo projects like Joystick Control, or any of the other ROS 2 Open Source Packages.