Trossen AI Configuration
In order to use the Trossen AI Kits with LeRobot, you need to first configure the arms with the necessary specifications. The specifications include the IP address, model_name, and camera serial numbers. The following steps will guide you on how to configure the Trossen AI Kits with LeRobot.
This is an example of a configuration file for the Trossen AI Kits with LeRobot, you can find this in lerobot/common/robot_devices/robots/configs.py:
@RobotConfig.register_subclass("trossen_ai_stationary")
@dataclass
class TrossenAIStationaryRobotConfig(ManipulatorRobotConfig):
# /!\ FOR SAFETY, READ THIS /!\
# `max_relative_target` limits the magnitude of the relative positional target vector for safety purposes.
# Set this to a positive scalar to have the same value for all motors, or a list that is the same length as
# the number of motors in your follower arms.
# For Trossen AI Arms, for every goal position request, motor rotations are capped at 5 degrees by default.
# When you feel more confident with teleoperation or running the policy, you can extend
# this safety limit and even removing it by setting it to `null`.
# Also, everything is expected to work safely out-of-the-box, but we highly advise to
# first try to teleoperate the grippers only (by commenting out the rest of the motors in this yaml),
# then to gradually add more motors (by uncommenting), until you can teleoperate both arms fully
max_relative_target: int | None = 5
# Gain applied to external efforts sensed on the follower arm and transmitted to the leader arm.
# This enables the user to feel external forces (e.g., contact with objects) through force feedback.
# A value of 0.0 disables force feedback. A good starting value for a responsive experience is 0.1.
force_feedback_gain: float = 0.0
# Set this according to the camera interface you want to use.
# "intel_realsense" is the default and recommended option.
# "opencv" is a fallback option that uses OpenCV to access the cameras.
camera_interface: Literal["intel_realsense", "opencv"] = "intel_realsense"
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"left": TrossenArmDriverConfig(
# wxai
ip="192.168.1.3",
model="V0_LEADER",
),
"right": TrossenArmDriverConfig(
# wxai
ip="192.168.1.2",
model="V0_LEADER",
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"left": TrossenArmDriverConfig(
ip="192.168.1.5",
model="V0_FOLLOWER",
),
"right": TrossenArmDriverConfig(
ip="192.168.1.4",
model="V0_FOLLOWER",
),
}
)
if camera_interface == "opencv":
print("Using OpenCV camera interface")
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_high": OpenCVCameraConfig(
camera_index=26,
fps=30,
width=640,
height=480,
),
"cam_low": OpenCVCameraConfig(
camera_index=14,
fps=30,
width=640,
height=480,
),
"cam_left_wrist": OpenCVCameraConfig(
camera_index=8,
fps=30,
width=640,
height=480,
),
"cam_right_wrist": OpenCVCameraConfig(
camera_index=20,
fps=30,
width=640,
height=480,
),
}
)
elif camera_interface == "intel_realsense":
# Troubleshooting: If one of your IntelRealSense cameras freeze during
# data recording due to bandwidth limit, you might need to plug the camera
# on another USB hub or PCIe card.
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_high": IntelRealSenseCameraConfig(
serial_number=218622270304,
fps=30,
width=640,
height=480,
),
"cam_low": IntelRealSenseCameraConfig(
serial_number=130322272628,
fps=30,
width=640,
height=480,
),
"cam_left_wrist": IntelRealSenseCameraConfig(
serial_number=218622274938,
fps=30,
width=640,
height=480,
),
"cam_right_wrist": IntelRealSenseCameraConfig(
serial_number=128422271347,
fps=30,
width=640,
height=480,
),
}
)
else:
raise ValueError(
f"Unknown camera interface: {camera_interface}. Supported values are 'opencv' and 'intel_realsense'."
)
mock: bool = False
@RobotConfig.register_subclass("trossen_ai_mobile")
@dataclass
class TrossenAIMobileRobotConfig(RobotConfig):
# /!\ FOR SAFETY, READ THIS /!\
# `max_relative_target` limits the magnitude of the relative positional target vector for safety purposes.
# Set this to a positive scalar to have the same value for all motors, or a list that is the same length as
# the number of motors in your follower arms.
# For Trossen AI Arms, for every goal position request, motor rotations are capped at 5 degrees by default.
# When you feel more confident with teleoperation or running the policy, you can extend
# this safety limit and even removing it by setting it to `null`.
# Also, everything is expected to work safely out-of-the-box, but we highly advise to
# first try to teleoperate the grippers only (by commenting out the rest of the motors in this yaml),
# then to gradually add more motors (by uncommenting), until you can teleoperate both arms fully
max_relative_target: int | None = 5
# Gain applied to external efforts sensed on the follower arm and transmitted to the leader arm.
# This enables the user to feel external forces (e.g., contact with objects) through force feedback.
# A value of 0.0 disables force feedback. A good starting value for a responsive experience is 0.1.
force_feedback_gain: float = 0.0
# Set this according to the camera interface you want to use.
# "intel_realsense" is the default and recommended option.
# "opencv" is a fallback option that uses OpenCV to access the cameras.
camera_interface: Literal["intel_realsense", "opencv"] = "intel_realsense"
enable_motor_torque: bool = False
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"left": TrossenArmDriverConfig(
# wxai
ip="192.168.1.3",
model="V0_LEADER",
),
"right": TrossenArmDriverConfig(
# wxai
ip="192.168.1.2",
model="V0_LEADER",
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"left": TrossenArmDriverConfig(
ip="192.168.1.5",
model="V0_FOLLOWER",
),
"right": TrossenArmDriverConfig(
ip="192.168.1.4",
model="V0_FOLLOWER",
),
}
)
if camera_interface == "opencv":
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_high": OpenCVCameraConfig(
camera_index=26,
fps=30,
width=640,
height=480,
),
"cam_left_wrist": OpenCVCameraConfig(
camera_index=8,
fps=30,
width=640,
height=480,
),
"cam_right_wrist": OpenCVCameraConfig(
camera_index=20,
fps=30,
width=640,
height=480,
),
}
)
elif camera_interface == "intel_realsense":
# Troubleshooting: If one of your IntelRealSense cameras freeze during
# data recording due to bandwidth limit, you might need to plug the camera
# on another USB hub or PCIe card.
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_high": IntelRealSenseCameraConfig(
serial_number=130322274102,
fps=30,
width=640,
height=480,
),
"cam_left_wrist": IntelRealSenseCameraConfig(
serial_number=130322271087,
fps=30,
width=640,
height=480,
),
"cam_right_wrist": IntelRealSenseCameraConfig(
serial_number=130322270184,
fps=30,
width=640,
height=480,
),
}
)
else:
raise ValueError(
f"Unknown camera interface: {camera_interface}. Supported values are 'opencv' and 'intel_realsense'."
)
mock: bool = False
@RobotConfig.register_subclass("trossen_ai_solo")
@dataclass
class TrossenAISoloRobotConfig(ManipulatorRobotConfig):
# /!\ FOR SAFETY, READ THIS /!\
# `max_relative_target` limits the magnitude of the relative positional target vector for safety purposes.
# Set this to a positive scalar to have the same value for all motors, or a list that is the same length as
# the number of motors in your follower arms.
# For Trossen AI Arms, for every goal position request, motor rotations are capped at 5 degrees by default.
# When you feel more confident with teleoperation or running the policy, you can extend
# this safety limit and even removing it by setting it to `null`.
# Also, everything is expected to work safely out-of-the-box, but we highly advise to
# first try to teleoperate the grippers only (by commenting out the rest of the motors in this yaml),
# then to gradually add more motors (by uncommenting), until you can teleoperate both arms fully
max_relative_target: int | None = 5
# Gain applied to external efforts sensed on the follower arm and transmitted to the leader arm.
# This enables the user to feel external forces (e.g., contact with objects) through force feedback.
# A value of 0.0 disables force feedback. A good starting value for a responsive experience is 0.1.
force_feedback_gain: float = 0.0
# Set this according to the camera interface you want to use.
# "intel_realsense" is the default and recommended option.
# "opencv" is a fallback option that uses OpenCV to access the cameras.
camera_interface: Literal["intel_realsense", "opencv"] = "intel_realsense"
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": TrossenArmDriverConfig(
# wxai
ip="192.168.1.2",
model="V0_LEADER",
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": TrossenArmDriverConfig(
ip="192.168.1.3",
model="V0_FOLLOWER",
),
}
)
if camera_interface == "opencv":
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_main": OpenCVCameraConfig(
camera_index=26,
fps=30,
width=640,
height=480,
),
"cam_wrist": OpenCVCameraConfig(
camera_index=8,
fps=30,
width=640,
height=480,
),
}
)
elif camera_interface == "intel_realsense":
# Troubleshooting: If one of your IntelRealSense cameras freeze during
# data recording due to bandwidth limit, you might need to plug the camera
# on another USB hub or PCIe card.
cameras: dict[str, CameraConfig] = field(
default_factory=lambda: {
"cam_main": IntelRealSenseCameraConfig(
serial_number=130322270184,
fps=30,
width=640,
height=480,
),
"cam_wrist": IntelRealSenseCameraConfig(
serial_number=218622274938,
fps=30,
width=640,
height=480,
),
}
)
else:
raise ValueError(
f"Unknown camera interface: {camera_interface}. Supported values are 'opencv' and 'intel_realsense'."
)
mock: bool = False
Setup IP Address
Note
By default, the IP address for a Trossen AI arm is set to 192.168.1.2.
Make sure to change the IP addresses of your Trossen AI arms to match the ones in the configuration file.
To set up the IP address for the Trossen AI Arms, you must first ensure that the arms are connected to the same network as your computer. Refer to Ethernet Setup for correct connection instructions. Once connected, you can find or configure the IP address using the configure_cleanup demo or the set_ip_method and set_manual_ip demos.
Camera Serial Number
There are two ways to set up the camera serial numbers for the Trossen AI Kits with LeRobot: using the Intel RealSense interface or the OpenCV interface.
Based on the camera interface you choose, follow the appropriate steps below to set up the camera serial numbers.
You can setup both interfaces at the same time, and use the --robot.camera_interface argument to switch between them.
By default, the camera interface is set to intel_realsense.
We will look at this in more detail in the next sections.
Open realsense-viewer
realsense-viewer
Note
If realsense-viewer is not already installed on your machine, follow these steps on the librealsense GitHub repository to install
librealsense2-utils.Plug in a single camera and check the sidebar for its entry. If it does not show up in the side bar, click Add Source and find the Intel RealSense D405 in the drop down.
Click on Info for the camera, find the Serial Number, and copy it.
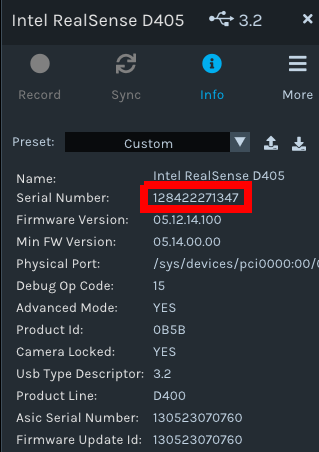
Put the camera serial number in the appropriate config entry at lerobot/common/robot_devices/robots/configs.py.
Repeat for the rest of the cameras.
The OpenCVCamera class allows you to efficiently record frames from most cameras using the opencv2 library. For more details on compatibility, see Video I/O with OpenCV Overview.
To instantiate an OpenCVCamera, you need a camera index (e.g. OpenCVCamera(camera_index=0)).
When you only have one camera like a webcam of a laptop, the camera index is usually 0 but it might differ, and the camera index might change if you reboot your computer or re-plug your camera.
This behavior depends on your operating system.
To find the camera indices, run the following utility script, which will save a few frames from each detected camera:
python lerobot/common/robot_devices/cameras/opencv.py \ --images-dir outputs/images_from_opencv_cameras
The output will look something like this if you have two cameras connected:
Mac or Windows detected. Finding available camera indices through scanning all indices from 0 to 60 [...] Camera found at index 0 Camera found at index 1 [...] Connecting cameras OpenCVCamera(0, fps=30.0, width=1920.0, height=1080.0, color_mode=rgb) OpenCVCamera(1, fps=24.0, width=1920.0, height=1080.0, color_mode=rgb) Saving images to outputs/images_from_opencv_cameras Frame: 0000 Latency (ms): 39.52 [...] Frame: 0046 Latency (ms): 40.07 Images have been saved to outputs/images_from_opencv_cameras
Check the saved images in outputs/images_from_opencv_cameras to identify which camera index corresponds to which physical camera (e.g.
0forcamera_00or1forcamera_01):camera_00_frame_000000.png [...] camera_00_frame_000047.png camera_01_frame_000000.png [...] camera_01_frame_000047.png
Note
Some cameras may take a few seconds to warm up, and the first frame might be black or green.
Put the camera index in the appropriate config entry at lerobot/common/robot_devices/robots/configs.py.
cameras: dict[str, CameraConfig] = field( default_factory=lambda: { "cam_xxxx": OpenCVCameraConfig( camera_index=0, fps=30, width=640, height=480, ), "cam_xxxx": OpenCVCameraConfig( camera_index=1, fps=30, width=640, height=480, ), } )