Trossen Robotics Docs Home
Specifications
In-Depth Specifications
LoCoBot Base
Default Servo Configurations
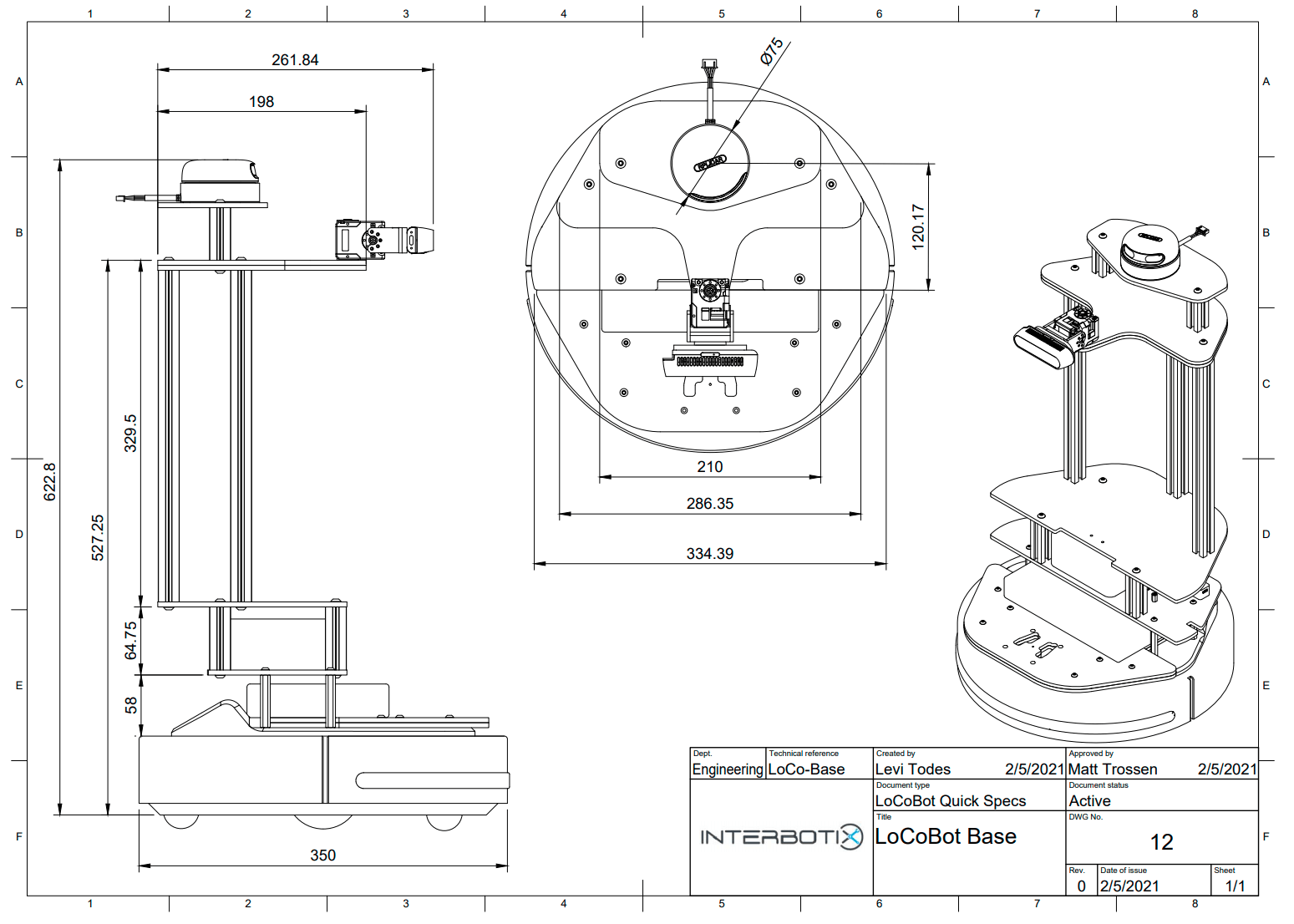
Drawings
LoCoBot PincherX-100
LoCoBot WidowX-200
LoCoBot WidowX-250 6 DOF
Model Specifications Table
Hardware
Getting Started
ROS Interface
Python-ROS Interface
ROS 1 Open Source Packages
ROS 2 Open Source Packages
Troubleshooting
Interbotix X-Series LoCoBots Documentation
Specifications
LoCoBot Base
Edit on GitHub
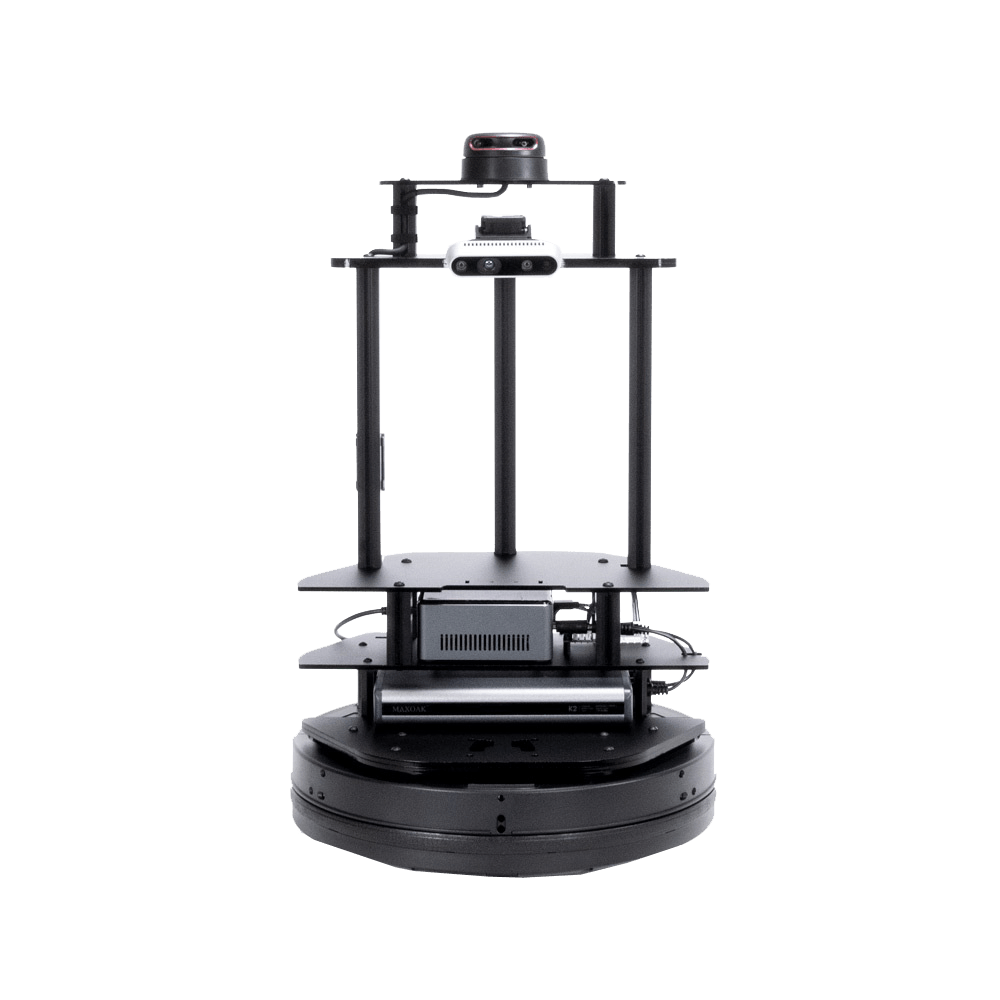
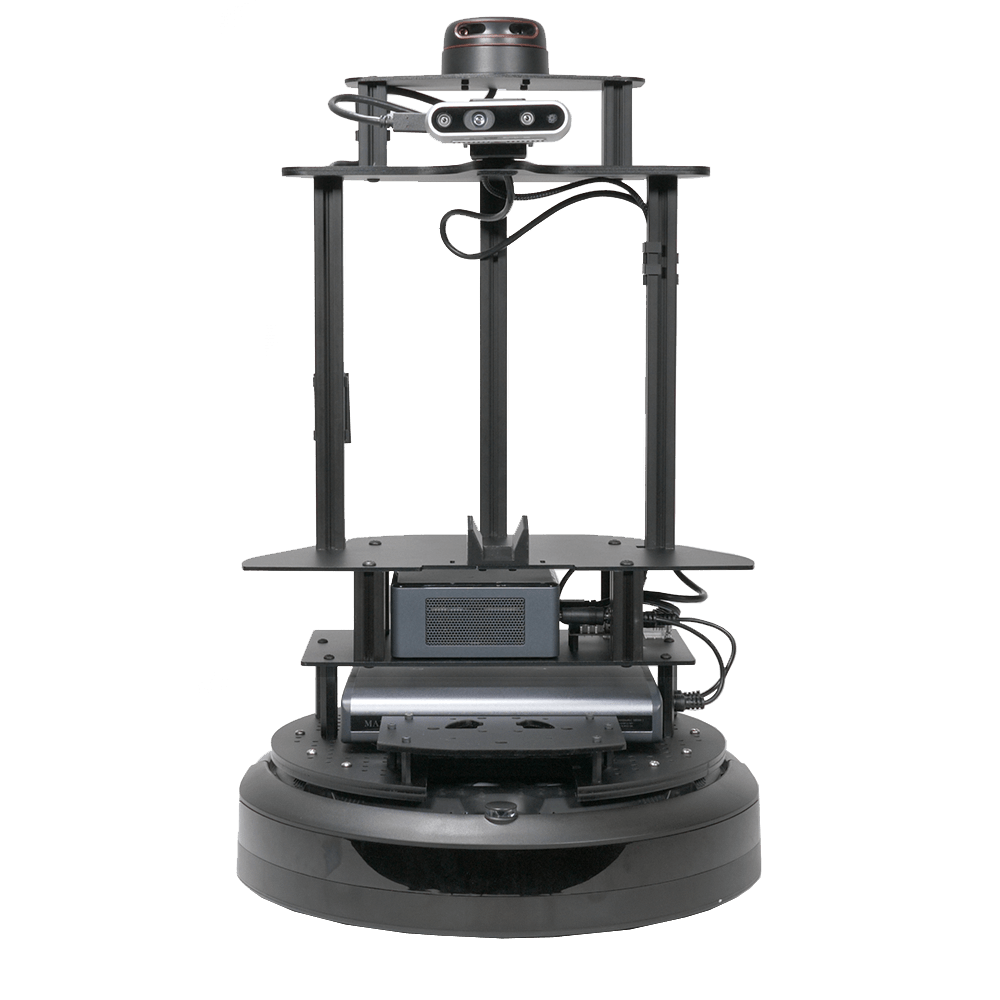
LoCoBot Base
LoCoBot Base (Kobuki)
LoCoBot Base (Create® 3)
Default Servo Configurations
ID
Joint Name
Servo
Baudrate
10
pan
2XL430-W250
1Mbps
11
tilt
2XL430-W250
1Mbps
Drawings