Traffic Light Identification
Overview
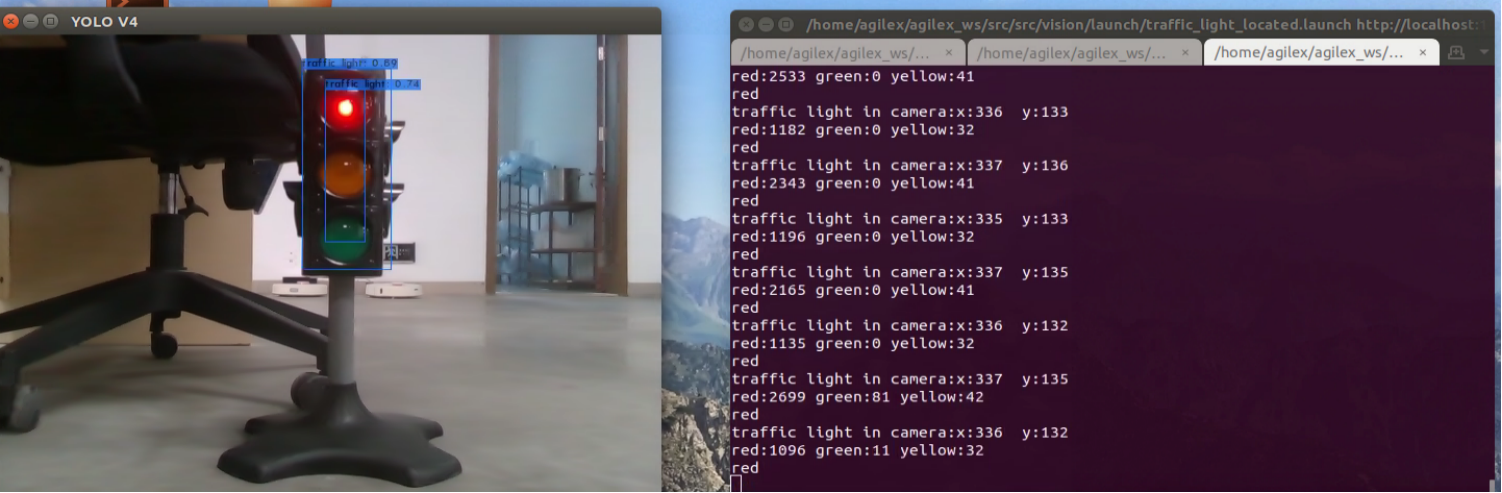
After the traffic lights are detected through darknet_ros, the traffic lights must be identified and positioned in the three-dimensional space to generate the relative position of the object to the camera. This method can only realize the identification and positioning of the traffic lights, and cannot obtain the status of the traffic lights. Depth camera is needed, and its recognition distance depends on the depth camera’s range.
Usage
Note
Use Ctrl + C command to end all the processes before running the below commands.
Start the camera. Open a new terminal and enter the command:
$ roslaunch astra_camera dabai_u3.launch
Launch yolo_v3. Open a new terminal and enter the command:
$ roslaunch darknet_ros yolo_v3_tiny.launchLaunch the traffic light recognition function. Open a new terminal and enter the command:
$ roslaunch vision traffic_light_located.launch