Trossen Robotics Docs Home
Specifications
Getting Started
End Effector Selection
Trossen Robotics End Effector Selection
DH-Robotics End Effectors
AG-Series Adaptive Parallel Grippers
DH-Robotics AG-95 Adaptive Parallel Gripper
DH-Robotics AG-145 Adaptive Parallel Gripper
PGC-Series Collaborative Parallel Grippers
RGI-Series Rotary Cobot Grippers
PGE-Series Slim Parallel Grippers
DobotStudio Pro
DobotSCStudio
I/O Interface
Modbus Interface
TCP/IP Protocol
Cobot Applications
Interbotix X-Series Manipulators Documentation
End Effector Selection
DH-Robotics End Effectors
DH-Robotics AG-145 Adaptive Parallel Gripper
Edit on GitHub
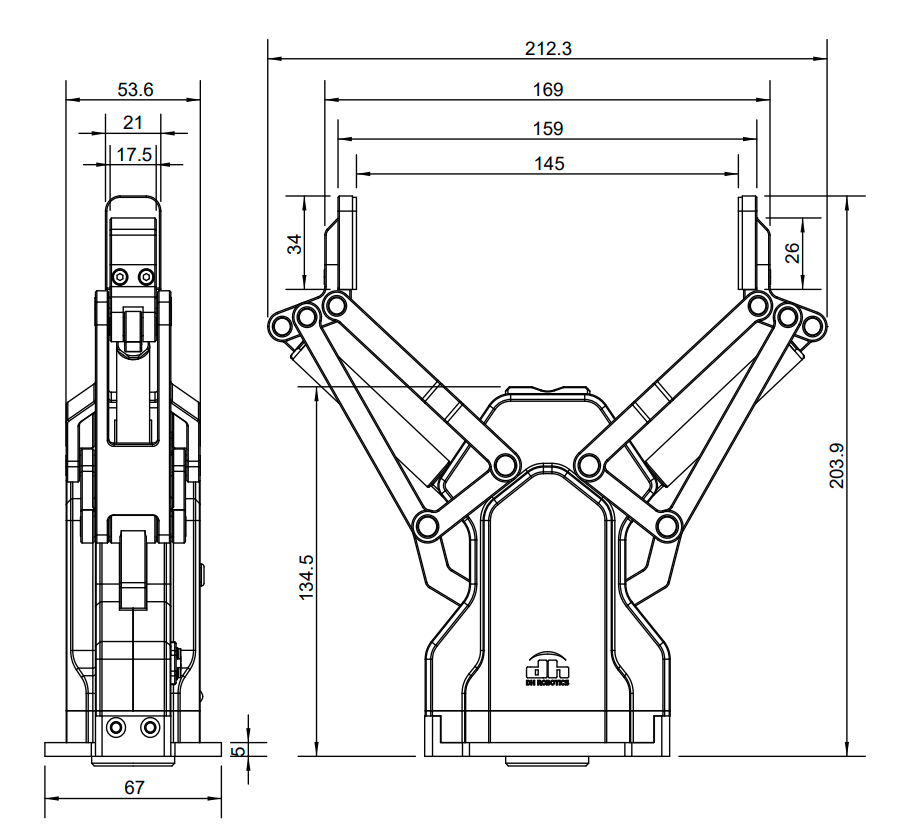
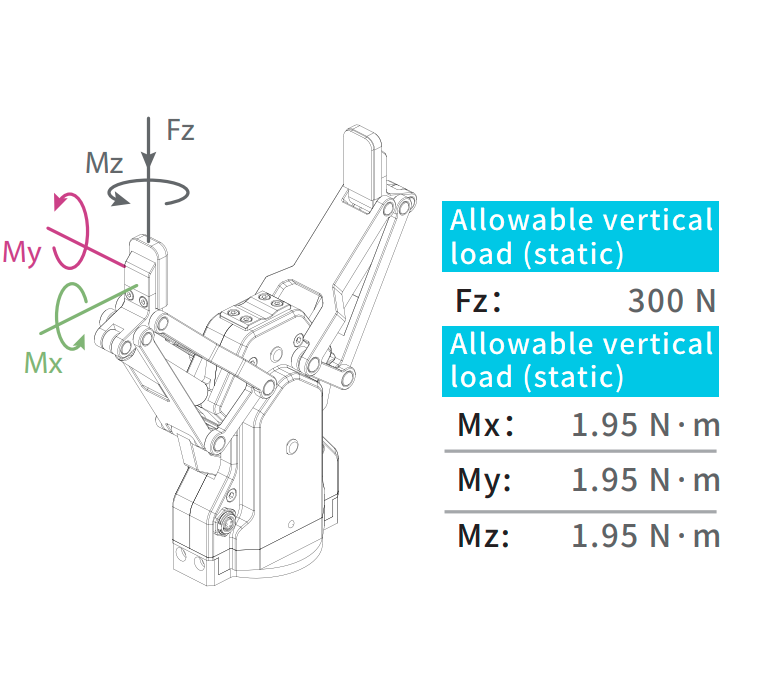
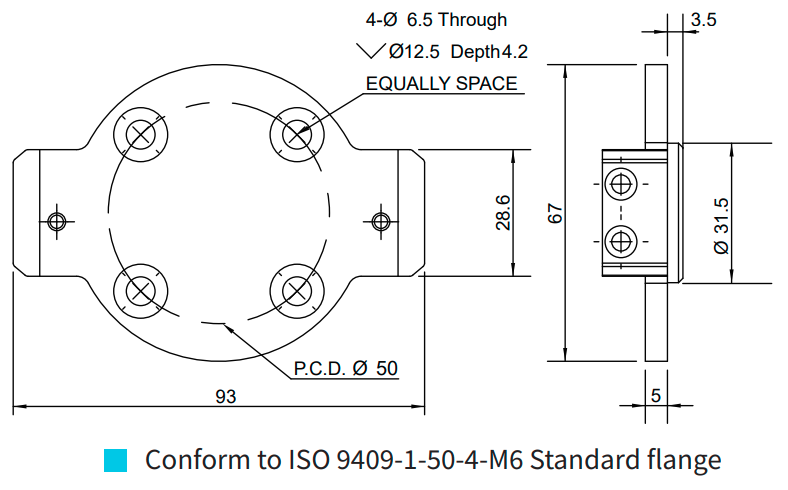
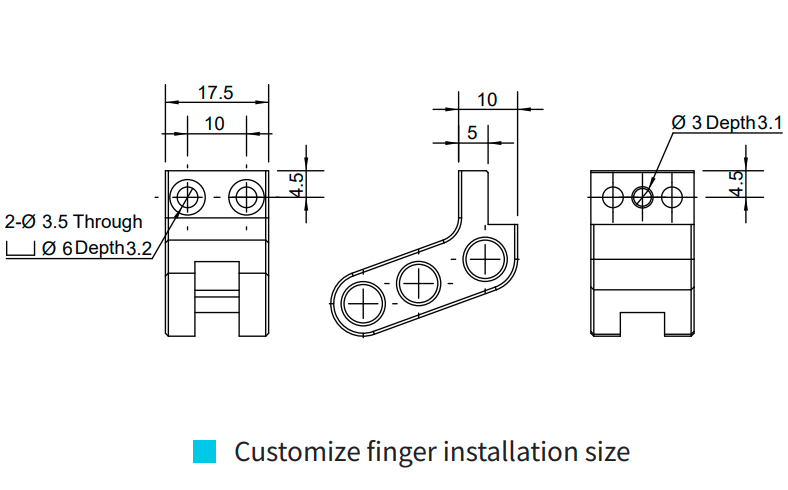
DH-Robotics AG-145 Adaptive Parallel Gripper
Characteristic
Value
Gripping Force
35~105 N
Stroke
145mm
Gripping Weight
2 kg
Repeat Accuracy (Positioning)
± 0.03 mm
Opening / Closing
0.7 s/0.7 s
Weight
1.3 kg
Noise Emission
< 50 dB
Communication Interface
Standard: Modbus RTU (RS485), Digital I/O
Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT
Nominal Voltage
24 V DC ± 10%
Nominal Current
0.8 A
Max Current
1.5 A
IP Rating
IP 54
Recommended Operating Environment
0~40°C, < 85% RH