LIMO Specifications

Specifications Overview
| Weight | 4.2kg |
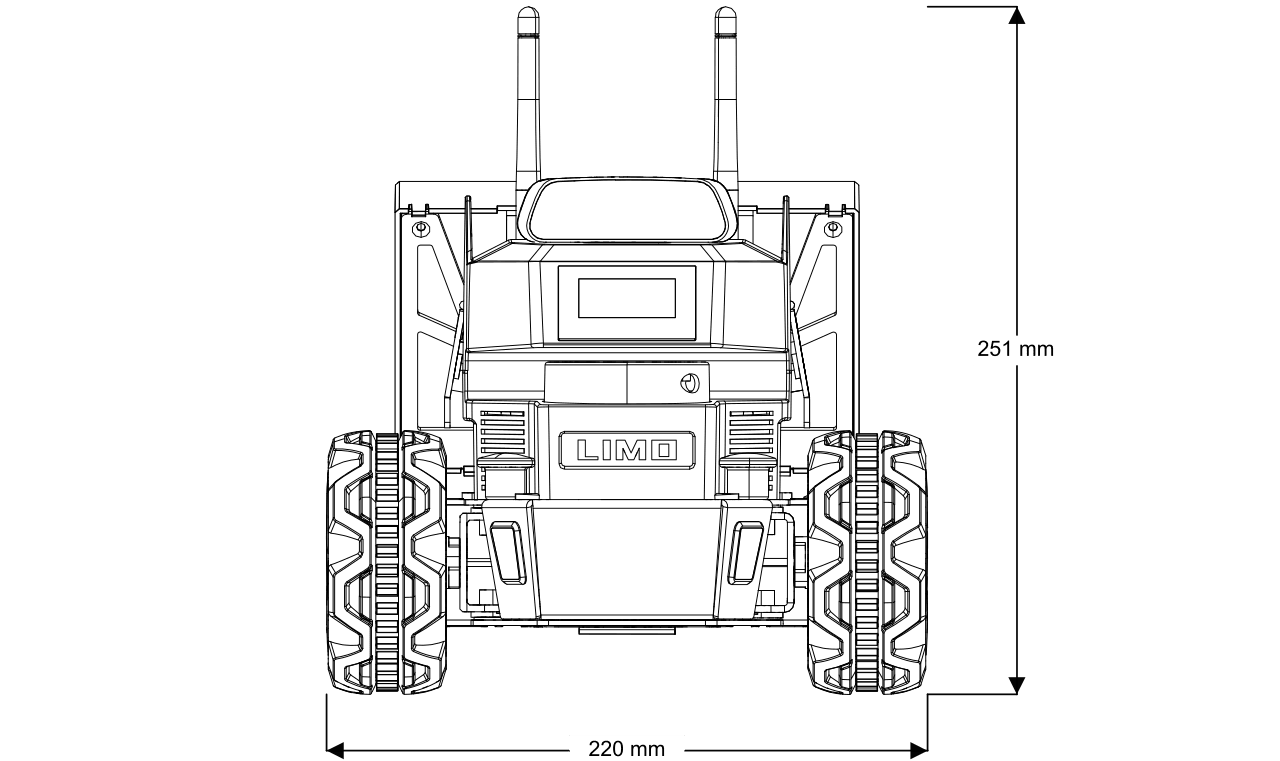
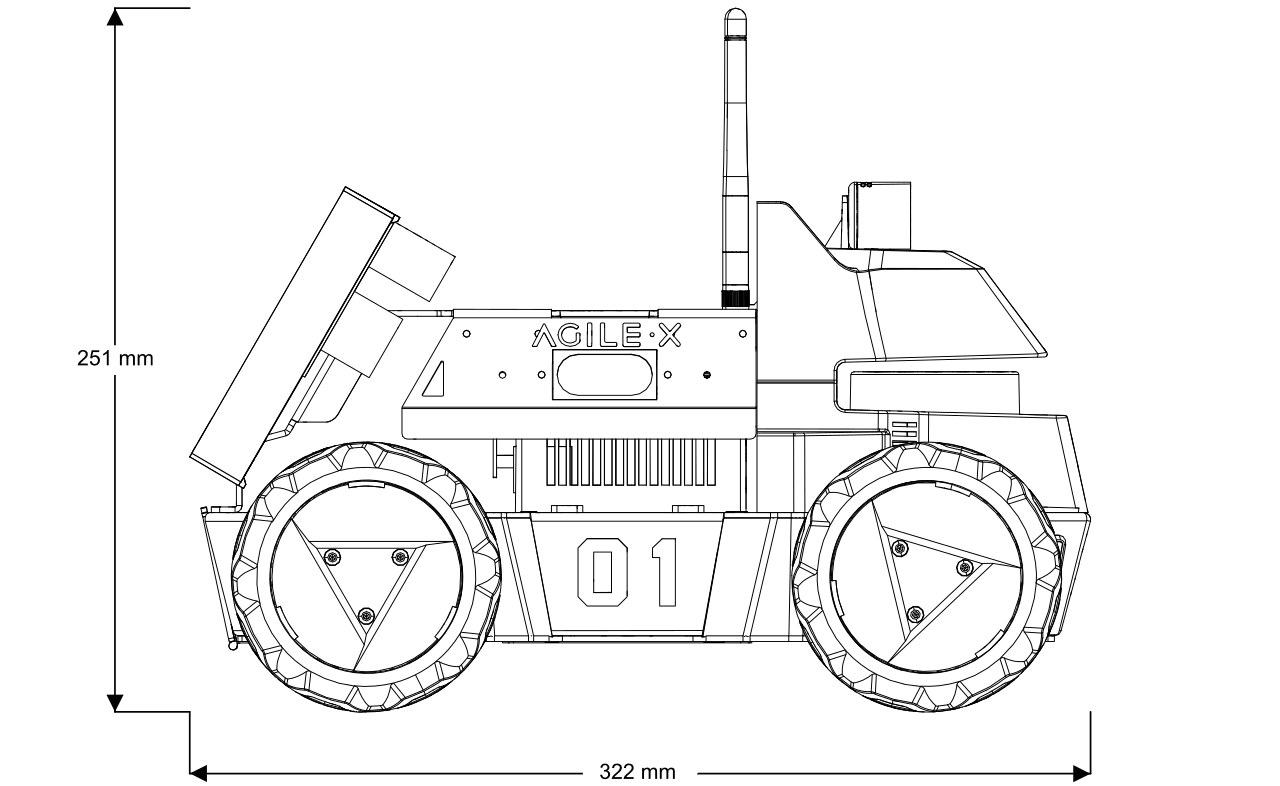
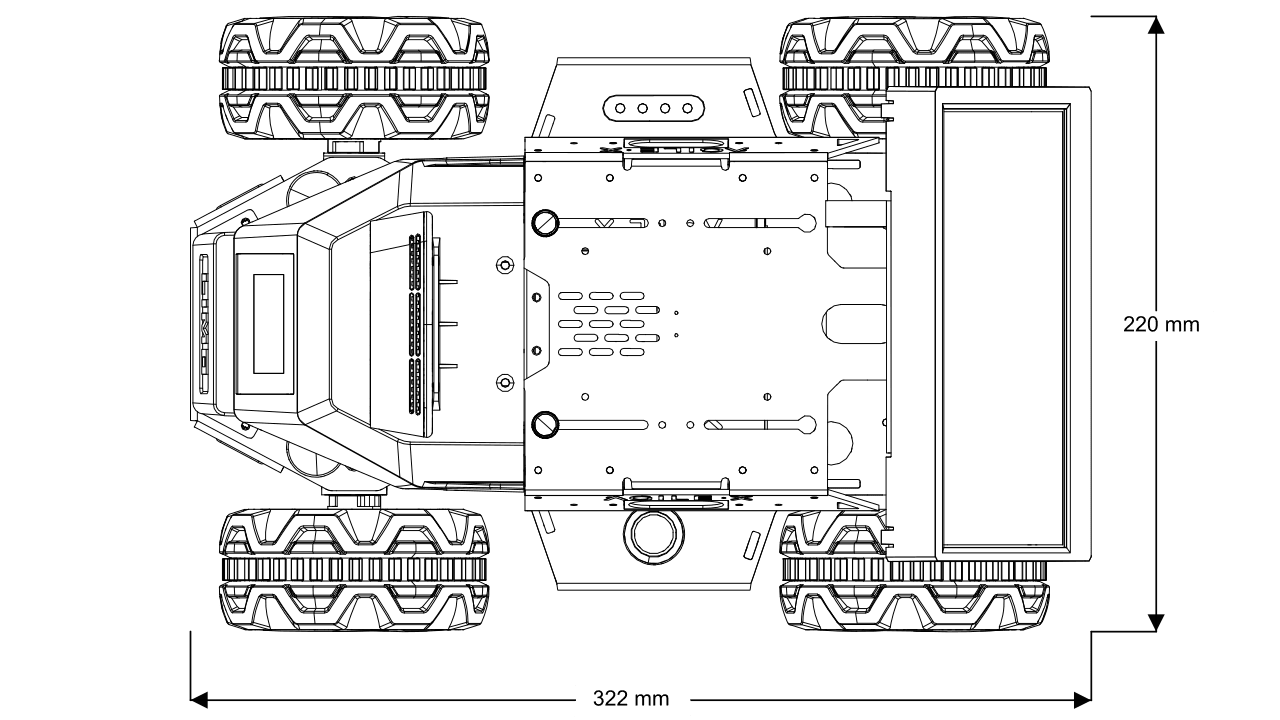
| Dimensions | 322x215x247mm |
| Run Time | 40 minutes |
| Standby Time | 2 hours |
| Operating System | Ubuntu 18.04 |
| Climbable Slope | 25° |
| Working Temperature Range | -10°C - 40°C |
| Charging Interface | 5.5x2.1mm DC Barrel Jack |
| CPU | ARM64 Quad Core 1.43GHz (Cortex-A57) |
| GPU | 128core NVIDIA Maxwell™ @ 921MHz |
| Battery | 12V Li-ion 5600mAh |
Sensors & Onboard Devices
IMU MPU6050
EAI X2L LiDAR
The YDLIDAR X2L LiDAR is a 360 degree two-dimensional ranging product developed by Shenzhen EAI Technology Co., Ltd. (EAI). This product is based on the principle of trigonometric ranging and is equipped with related optical, electrical, and algorithm design to achieve high-frequency and high-precision distance measurement. While measuring distance, the mechanical structure rotates 360 degrees and continuously obtains angle information, thereby achieving 360 degrees scanning distance measurement, and output point cloud data of the scanning environment.
| Items | Minimum | Default | Maximum | Unit | Remarks |
|---|---|---|---|---|---|
| Ranging frequency | / | 3000 | / | Hz | 3000 ranging times per second |
| Scanning frequency | 5 | 6 | 8 | Hz | PWM signal needs to be connected, and the recommended frequency is 6Hz. |
| Ranging range | 0.12 | / | 8 | m | Indoor environment, and objects with 80% reflectivity |
| Scanning angle | / | 0-360 | / | ° | / |
| Absolute tolerance | / | 2 | / | cm | When ranging ≤1m |
| Relative tolerance | / | 3.5% | / | / | When 1m < ranging ≤ 6m |
| Pitch angle | 0.25 | 1 | 1.75 | ° | / |
| Angle resolution | 0.60 (5Hz) | 0.72 (6Hz) | 0.96 (8Hz) | ° | Different scanning frequency |
ORBBEC® DaBai Stereo Depth Camera
| Parameter name | Parameter index |
|---|---|
| The distance between the imaging centers of the left and right infrared cameras | 40mm |
| Depth distance | 0.3-3m |
| Power consumption | The average power consumption of the whole machine is <2W;The peak value at the moment the laser is turned on <5W (duration: 3ms);Typical standby power consumption is <0.7W. |
| Depth map resolution | 640x400 @ 30FPS; 320x200 @ 30FPS |
| Color map resolution | 1920x1080 @ 30FPS; 1280x720 @ 30FPS; 640x480 @ 30FPS |
| Accuracy | 6mm @ 1m (81% FOV area participates in accuracy calculation*) |
| Depth FOV | H 67.9° V 45.3° |
| Color FOV | H 71° V43.7° @1920X1080 |
| Delay | 30-45ms |
| Data transmission | USB2.0 or above |
| Supported operating system | Android / Linux / Windows7/10 |
| Power supply mode | USB |
| Operating temperature | 10°C ~ 40°C |
| Applicable scene | Indoor / outdoor (specifically subject to application scenes and related algorithm requirements) |
| Dustproof and waterproof | Foundation dustproof |
| Safety | Class 1 laser |
| Dimensions (mm) | Length 59.6 X width 17.4 X thickness 11.1mm |
NVIDIA Jetson Nano 4G
iFLYTEK Voice Assistant
Dual Channel Speakers (2x2W)
USB Hub
Front Display
Rear Display
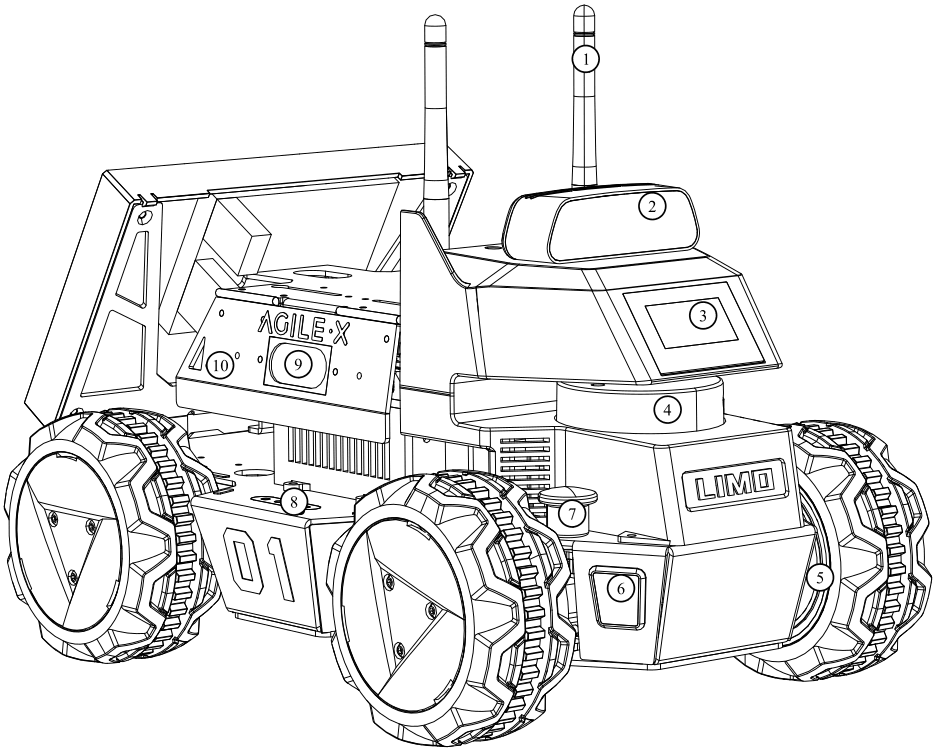
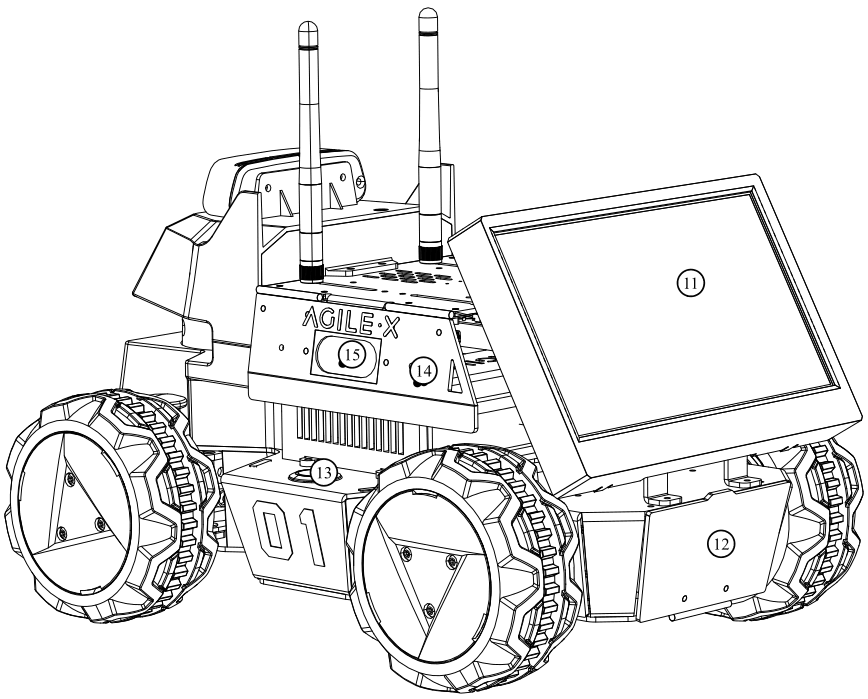
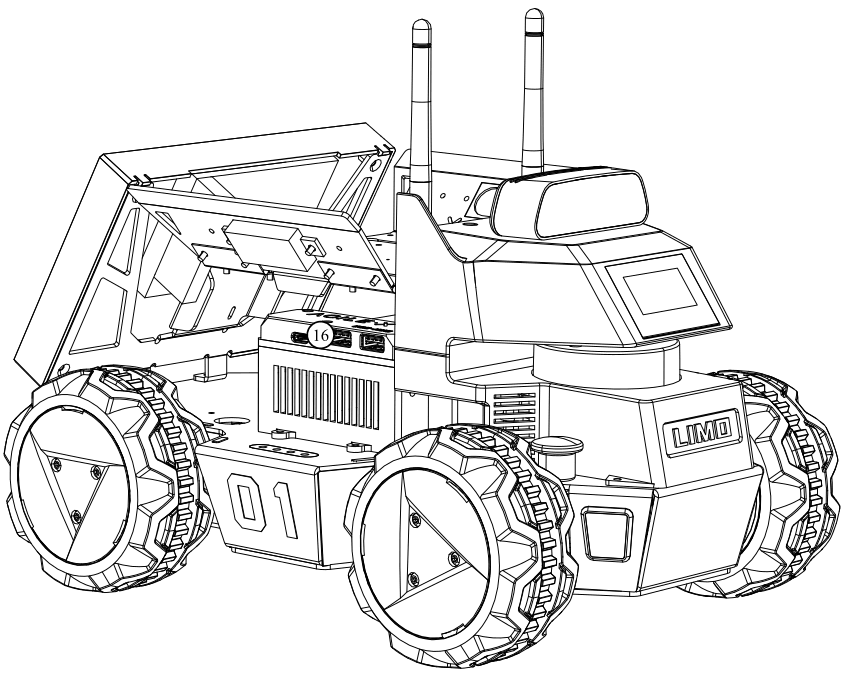
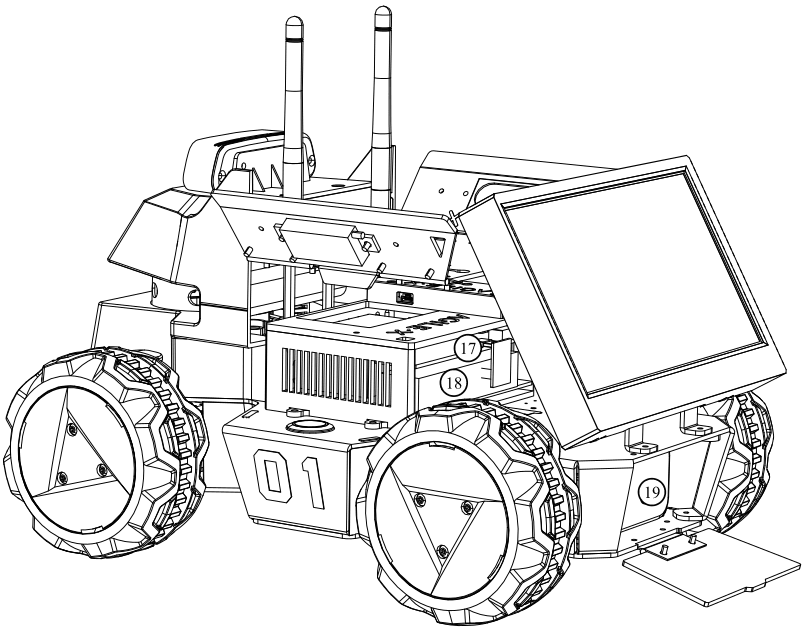
LIMO Component Overview
|
|
|
|
|
|
|
|