Motion Parameters
Jog Setting
You can set the maximum speed and acceleration in the Joint coordinate system and Cartesian coordinate system in this menu. Click Save after setting the parameters.
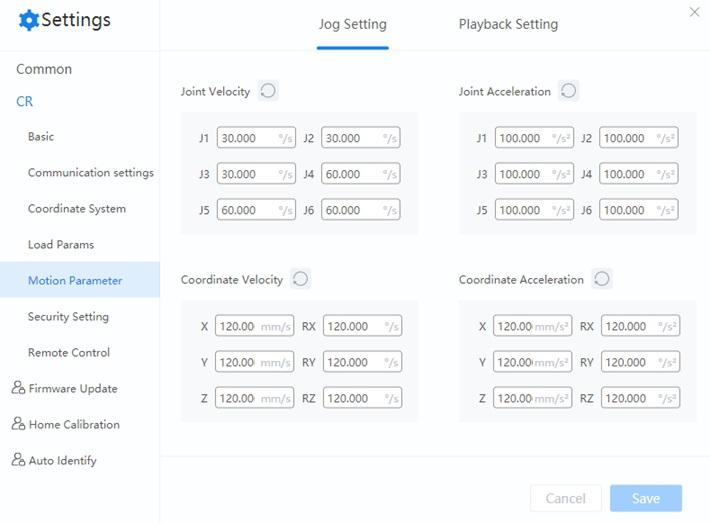
Actual robot speed/acceleration = set speed/acceleration * global speed ratio.
Clicking the refresh button will restore all values in the corresponding module to their default values.
Playback Setting
You can set the velocity, acceleration and jerk in the Joint coordinate system and Cartesian coordinate system in this menu. Click Save after setting the parameters.
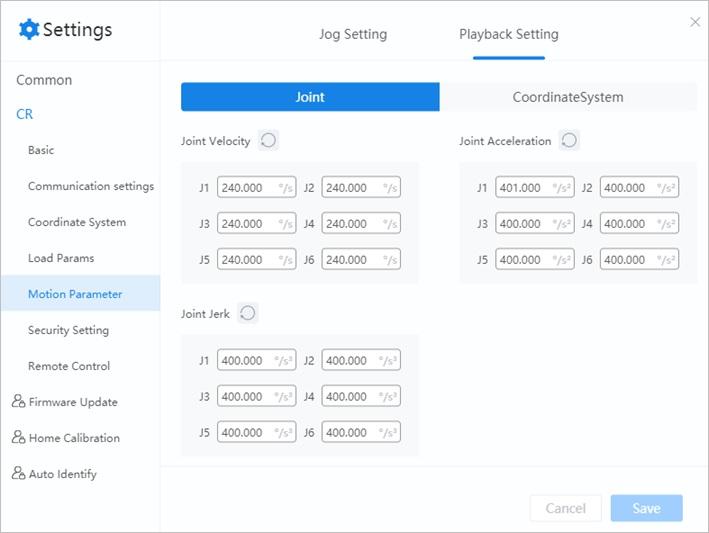
Actual robot speed/acceleration = set speed/acceleration * global speed ratio * set percentage in speed commands when programming
Clicking the refresh button will restore all values in the corresponding module to their default values.